
Robotlar; insan kullanıcılara, günlük görevleri tamamlarken en iyi şekilde yardımcı olmak için, sorgularını anlayabilmeli, onlara cevap verebilmeli ve buna göre eylemler gerçekleştirebilmelidir. Başka bir deyişle; bir kullanıcının sözlü talimatları ile uyumlu eylemleri esnek bir şekilde oluşturabilmeli ve gerçekleştirebilmelidirler.
Kullanıcının talimatlarını anlamak ve buna göre hareket etmek için robotik sistemler; dilsel ifadeler, eylemler ve ortamlar arasında ilişki kurabilmelidir. Derin sinir ağları, dilsel ifadelerin temsillerini elde etmede özellikle iyi olduklarını kanıtladılar. Ancak genellikle robot eylemleri; dilsel açıklamalar ve farklı ortamlar hakkında bilgiler dahil olmak üzere; büyük veri kümeleri üzerinde eğitilmeleri gerekiyor.
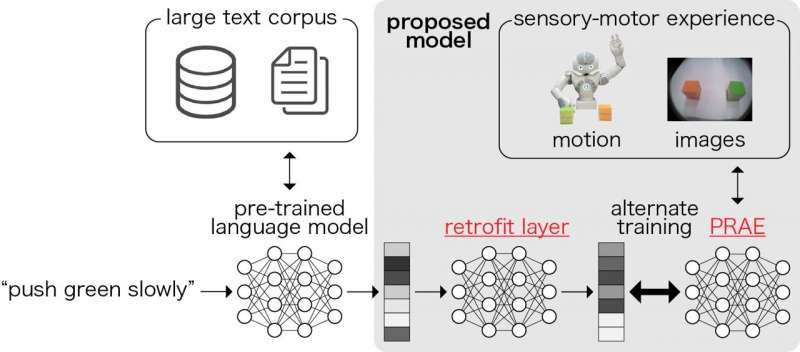
Tokyo’daki Waseda Üniversitesi’ndeki araştırmacılar; kısa süre önce robot eylemlerinin temsil temelli sistemlerini ve bu eylemlerin dilbilimsel tanımlarını elde edebilen derin bir sinir ağı geliştirdi. IEEE Robotics and Automation Letters’da yayınlanan bir makalede sunulan bu teknik, robotların bir kullanıcının sözlü talimatlarıyla uyumlu eylemler gerçekleştirme becerisini geliştirmek için kullanılabilir.

Yeni derin sinir ağı tabanlı model; eylemlerin anlamlarının açıklamaları dahil olmak üzere kelimelerin vektör temsillerini elde edebilir. Bu gösterimleri kullanarak, bu kelimeler bilinmese bile (yani, başlangıç eğitim veri setine dahil edilmemişlerse), tek tek kelimeler için yeterli robot eylemleri oluşturabilir.
Ogata ve meslektaşları, modellerinin güçlendirme katmanını ve çift yönlü çeviri modelini dönüşümlü olarak eğitti. Bu eğitim süreci, modellerinin önceden eğitilmiş kelime düğümlerini dönüştürmesine ve bunları mevcut eylem çiftlerine ve ilişkili açıklamalara uyarlamasına olanak tanır.
Araştırmacı Ogata: “Çalışmamız, dil ve eylemin entegrasyon öğreniminin, yalnızca büyük bir metin kullanan, derin öğrenme modellerinde elde edilmesi zor olan, bilinmeyen kelimeler dahil olmak üzere; zarfların ve fiillerin gerçek dünyadaki anlamlarını yansıtan vektör temsili kazanımlarını etkinleştirebilecek.”
İlk değerlendirmelerde; derin öğrenme tekniği, daha önce görülmemiş sözcüklerden (yani modeli eğitmek için kullanılan veri kümesindeki karşılık gelen eylemlerle eşleştirilmemiş sözcükler) robot eylemleri oluşturabildiği için oldukça umut verici sonuçlar elde etti. Gelecekte, yeni model; insan talimatlarını daha iyi anlayabilen ve ona göre hareket eden robotların geliştirilmesini sağlayabilir.
Araştırmacı Ogata: “Bu çalışma, bu yöndeki araştırmamızın ilk adımıydı ve dil ile davranışı birbirine bağlamada hala çok fazla alan var. Örneğin, bazı kelimeleri dönüştürmek hala zor. Bu araştırmada, robot hareketlerinin sayısı azdı, bu nedenle gelecekte daha karmaşık cümleleri işlemek için robotun esnekliğini artırmak istiyoruz.”