On yıldan fazla bir süredir sosyal ipuçları, korku, liderlik ve hatta kur yapmanın da dahil olduğu hayvan davranışının sürücülerini daha iyi anlamak için canlı hayvanlarla birlikte biyomekanik robotlar konuşlandırıldı ve sonunda hazırlar.
Doğa ile teknolojide görüşmeler her zaman tek yönlü olmuştur. Hayvanlar robotları gözlemlemekte ve buna tepki vermektedirler. Ancak NYU Tandon Mühendislik Fakültesi’ndeki mekanik ve uzay mühendisliği profesörü Maurizio Porfiri’nin laboratuarında robotlar hayvanları izleyebiliyorlar.
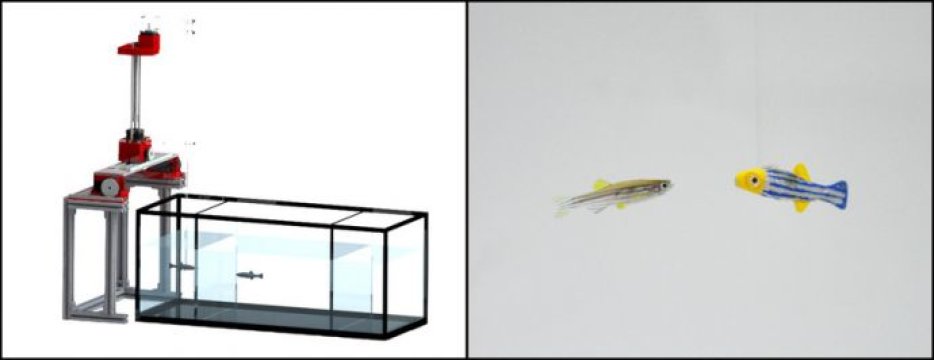
Porfiri ve işbirlikçilerinden oluşan bir ekip, canlı zebra balığı ile üç boyutta etkileşimli, biyolojik olarak sergilenen bir robot kopyalama özelliğine sahip ilk kapalı döngü kontrol sistemini tasarlamak ve test etmek için gerçek zamanlı izleme yazılımı ve robotik gelişimlerine imza attı.
Sistem, robot kopyasının canlı zebra balığı davranışını gerçek zamanlı olarak “görmesi” ve taklit etmesini sağlıyor. Zebra balığı ile yapılan deneylerle ilk örneğini oluşturan bu deneylerin sonuçları Bilimsel Raporlar ile yayınlandı.
Biyomekanik Robotlar
Ekip, robotik kopyanın ve canlı zebra balığının etkileşimini birkaç farklı deneysel koşul altında test etti. Çoğaltılan canlı balıklar şeffaf bir panelle ayrıldı. Zebra balığı tercih testlerinde, önceden belirlenmiş bir yüzme düzenini izleyen bir robot yerine, kendi davranışını yansıtan bir robot kopyasına karşı büyük kaygı ve korku belirtisi göstermedi.
Porfiri, yansıtma, sosyal etkileşimin temel, sınırlı bir biçimi iken, bu deneyler, robotlar ve canlı deniz türleri arasındaki alışverişin zenginleştirilmesi yönünde güçlü bir ilk adım olduğunu kaydetti.
Porfiri “Bu, hayvanlarla robotlar arasında inşa etmeyi umduğumuz etkileşim türleri için araştırmamız taban çizgisidir. Zebra balığının robota gerçek zamanlı tepkisini ölçme ve robotun gerçek zamanlı olarak izlemesini ve manevra yapmasını sağlayabilme olanağımız var ki bu da anlamlı. “Dedi.
Araştırmacılar, hayvanların doğal ipuçlarını ve tepkilerini daha iyi anlamak için canlı zebra balığı arasındaki sosyal etkileşimleri araştırıyorlar. Bu bilgi robotun gördüğü şeyleri kopyalamadan çok doğru yorumlamasına ve yanıtlamasına yardımcı olmak için kullanabilecek.