Taklit öğrenme; makinelerin belirli görevleri tamamlarken insan davranışlarını taklit etmesini sağlayan makine öğreniminin bir dalıdır. Bu teknikler, keşif ve ödül belirtimi gibi pekiştirme öğreniminin eksikliklerinden bazılarının üstesinden gelebiliyor. Bu yüzden robotik alanında büyük umut vaat etmektedir.
Teşvik edici sonuçlara rağmen, taklit öğrenme çalışmaları; bugüne kadar mevcut metotları kullanarak, büyük miktarda görevler; kısıtlı veri kümeleri olduğundan yeteri kadar toplanamamıştır. Bu sorunları giderebilmek için Stanford Üniversitesi’nden Dr. Silvio Savarese ve Dr. Fei-Fei Li tarafından kurulan ekip; yaygın olarak bulunan akıllı telefon cihazlarını kullanan yüksek kaliteli 6-DoF yörünge tabanlı teleoperasyon* için bir kitle kaynak platformu oluşturdu.
Araştırmacı Ajay Mandlekar: “Robotik için ImageNet gibi bir şey yaratmak istedik. Verilerin robot öğrenme alanında kilit bir sınırlama olduğuna inanıyoruz. Veriye dayalı kontrol ve pekiştirme öğrenimi gibi verilerden öğrenen pek çok yöntem olmasına rağmen; çoğu yöntem kendi verilerini toplamaktadır. Bu da çoğu zaman düşük kaliteyle gerçekleşir. Örneğin, işlem robotun kolunu rasgele hareket ettirmesiyle sonuçlanır. Bu tür bir araştırma, zor ve güvensiz olabilir. “

ImageNet; bilgisayar görüşü ve nesne tanıma araştırmalarında yaygın olarak kullanılan, Dr. Li tarafından yaratılan tanınmış bir görüntü veritabanıdır. Stanford Vision ve Learning Lab tarafından geliştirilen crowdsourcing platformu**, robotik ve taklit öğrenme çalışmaları için benzer bir kaynak olarak tasarlanmıştır.
RobotX’in Geliştiricisi Yuke Zhu: “ImageNet’ten farklı olarak, dinamik bir veri toplama sisteminin dinamik olması gerekiyordu, bu da sık sık talep üzerine veri toplamaya ve hatta belki de işbirlikli öğrenme yöntemini kullanmamıza izin veriyordu. Bunun nedeni, toplanan verilerin robotun çevrede ne gibi eylemlere bağlı olduğunu göstermesidir.”

Araştırmacıların nihai hedefi; robotları gelişmiş manipülasyon becerileri konusunda eğitmek ve paketleme veya montaj gibi endüstriyel ortamlardaki görevleri tamamlamalarını sağlamaktır. Taklit öğrenmenin bu bağlamda büyük bir potansiyel göstermesine rağmen; büyük miktarda görev gösterilerinin toplanmasında zorluklar nedeniyle mevcut veri kümelerinin çok sınırlı olduğunu bulmuşlardır.
Mandlekar: “Bilgisayar vizyonu ve doğal dil işleme gibi diğer alanlarda, veri kümeleri için büyük ölçekli denetim; genellikle kitle kaynak kullanımıyla toplanmaktadır. Bu, kapsamlı bir dizi sorun örneğinde; farklı insan gözetimi için ölçeklenebilir bir mekanizma sağlar. Ancak, büyük miktarlarda veri toplamak; robotik görevler için gerçek zamanlı etkileşim ve yorumculardan geri bildirim talep etmeleri ve uzaktan erişimde sınırlı kısıtlamalardan dolayı teleoperasyon platformlarında bir zorluk olmuştur. “
Stanford Vision ve Learning Lab‘deki grup; araştırmacıların, robotların ölçeklenebilir insan gözetimi aracılığıyla bağımsız olarak gerçekleştirebilecekleri becerileri ve görevleri ölçeklendirmesine olanak tanıyan, bir crowdsourcing platformu olan RoboTurk’le bu soruna çözüm üretti. Böylece Via RoboTurk ile uzak çalışanlar bir web sitesine giriş yapabilir ve akıllı telefonlarını hareket kontrolörü olarak kullanarak, görev gösterilerini toplayabilirler.
Mandlekar, “RoboTurk, müşterinin web tarayıcısına düşük gecikmeli iletişim protokolleri kullanarak, video akışı yapan bulut tabanlı bir simülasyonu arka taraftan destekler. Bu, müşteriye; bilgisayar kaynaklarından bağımsız olarak homojen bir hizmet kalitesi sağlar. Ayrıca kullanımı kolay bir girişime sahip olan ve crowdsourced görevinin temel gereksinimleri olan bir giriş engeliyle bir platform oluşturur. RoboTurk birden fazla robotu, görevi ve simülatörü destekler. “
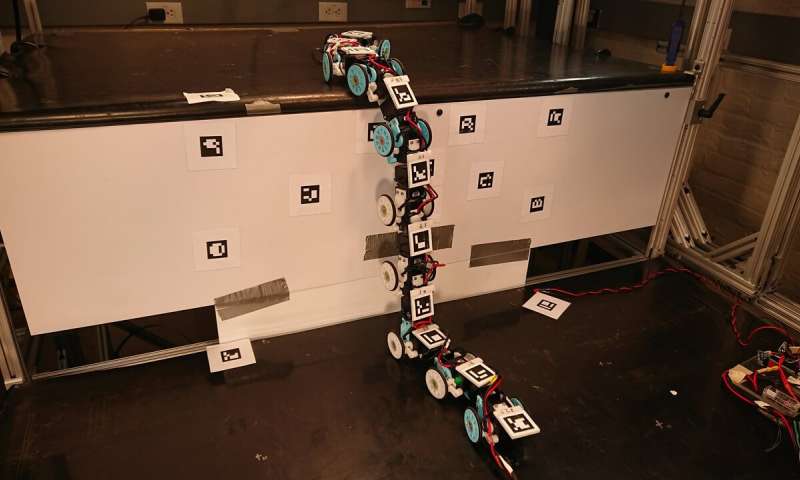
Araştırmacılar platformları; 15 ile 120 saniye arasında değişen sürelerde üç manipülasyon görevi üzerinde değerlendirdiler. RoboTurk’un sanal gerçeklik denetleyicileri gibi özel amaçlı donanımlarla istatistiksel benzerlik paylaştığını gördüler. Ayrıca, zayıf ağ koşullarının kullanıcıların platformda görevleri başarıyla gerçekleştirme becerilerini önemli ölçüde etkilemediğini de gözlemlemişlerdir. RoboTurk’u kullanarak; 22 saat toplam sistem kullanımında 2200’ün üzerinde başarılı görev gösterimi ile uzak çalışanlardan 137.5 saat manipülasyon verisi topladılar.
Projeyi Yöneten Animesh Garg: “Platformun en anlamlı kısmının insanların ve robotların etkileşimini nasıl sağlayacağı olduğunu düşünüyorum. Robotlar, geleceğin akıllı araçlarıdır. Robotlar açısından insanları bir yedek olarak değil; yeteneklerini genişletmenin bir yolu olarak düşünmeliyiz. Bu, insanları daha üretken ve daha yüksek seviyeli istihbarat sorunlarına odaklanmaya teşvik eder. “
RoboTurk, çok aşamalı ödüller ile çok aşamalı manipülasyon görevleri üzerinde yöntem öğrenimini etkin bir şekilde sağlar. Buna ek olarak, Mandlekar ve meslektaşları; yöntem öğrenimi sırasında daha büyük miktardaki gösterilerin kullanılmasının, daha iyi performansa ve daha fazla öğrenme tutarlılığına yol açacak önemli faydalar sağladığını buldular.
Gelecekte, RoboTurk robotik alanında daha gelişmiş ve daha iyi performans gösteren robotların geliştirilmesine yardımcı olan önemli bir kaynak haline gelebilir. Araştırmacılar, RoboTurk’u gerçek robotlara uygularken, aynı zamanda robotların düşük seviyeli becerilerini öğretmek için topladıkları verileri kullanabilecek algoritmalar da geliştiriyorlar.
Garg: “Robotlar, insan faaliyetinin her alanında daha üretken ve bağımsız olmalarını sağlayacak, örneğin bu sistemle bakıcıların hastalara daha iyi bakmasını sağlayan çok heyecan verici bir teknoloji olacak. Bizi heyecanlandıran şeylerden biri de; üretimin demokratikleşmesidir. Bu teknoloji, kullanıcıların özel amaçlı ekipmanlara ihtiyaç duymadan, özel ürünler üretmesini ve satmasını sağlayabilir. Tıpkı YouTube’un içerik oluşturma ve dağıtımını demokratikleştirdiği gibi, herkesin video oluşturmasına ve paylaşmasına da izin verir.”
* 6 DoF yörünge tabanlı teleoperasyon: six degrees of freedom – altı serbestlik düzeyi. sanal gerçeklik (virtual reality) sistemlerinde, algılayıcıyla ölçülebilen konum ve döndürme girişlerinin kısa adı ve bu yöntemle kullanılan uzaktan kontrol olayı.
** crowdsourcing: Kitle kaynak, bir sorunun çözümünün hazırı yoksa, kendi çalışanlarından veya piyasadaki seçme profesyonel danışman ya da uzmanlardan değil de, kitlelerden, yani becerebilen herhangi birisinden sağlanması sürecine verilen isim ya da sıfattır.