New York Rochester Teknoloji Enstitüsü’ndeki (RIT) Century Mold Collaborative Robotics Laboratory’den (CMCRL) araştırmacılar; son zamanlarda kullanıcıların bir görevi tamamlamak için bir robotla işbirliği yaparken, insan fizyolojik tepkilerini izlemek için yeni bir bakış açısı geliştirdiler. Multi Agent Biyo-Robotik Laboratuvarı Yöneticisi Prof. Ferat Şahin’in denetimi altında CMCRL araştırmacıları; endüstriyel ortamda insan-robot işbirliğini incelemek ve sistemler, çerçeveler ve yazılım araçları geliştirmek için çalışıyor. Bu yeni yaklaşım; insan-robot etkileşimleri sırasında fizyolojik verilerin toplanmasını sağlarken, robot hareketlerini değiştirip, etkileşimde olduğu insanda bir tepkiyi tetikler.
Pek çok uzman; yakında insanların ve makinelerin sanayi ve imalat da dahil olmak üzere çeşitli alanlarda birlikte çalışacağına inanmaktadır. Bununla birlikte, verimli otomasyon ve insan-robot işbirliğini sağlamak için, araştırmacıların; karar alma, el becerisi, esneklik ve yaratıcılık gibi insan becerilerini geliştiren, bunları robotlarla ilişkili hız, doğruluk ve güç ile birleştiren yaklaşımlar geliştirmeleri gerekecektir.
Aslında, tam otomasyon çok pahalı olurken, tek başına insanlar tarafından elle yapılan üretim; genellikle yavaştır ve hatalara açıktır. Bu nedenle insan-robot işbirliğini geliştiren araçlar geliştirmek önemlidir. Araştırmacılara göre, bu; Endüstri 5.0 olarak da bilinen Beşinci Sanayi Devrimi’nin merkezi bir parçası olacak.
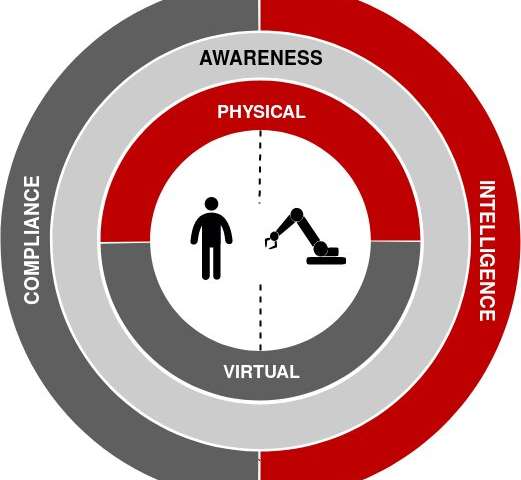
Araştırmacı Shitij Kumar: “Araştırmaya göre, endüstride insan-robot işbirliğinin üç temel zorluğu var. Bunlar emniyet, otomasyon ve verimlilik konusunda insan güvenidir. Bunların hepsi birbirine bağlı… Bu zorlukların üstesinden gelmek için, önce farklı insan-robot işbirliği senaryoları oluşturmamızı ve analiz etmemizi sağlayacak ‘sistem sistemi’ olarak bir insan-robot işbirliği (HRC) kurumu geliştirdik.”

Doktora çalışmalarının bir parçası olarak CMCRL Direktörü Dr. Ferat Şahin’in rehberliğinde Kumar; insan-robot ayrılma mesafesine ve ortak çalışma alanındaki eylemlere dayanarak, robot davranışını değiştiren bir sistem geliştirmeye başladı. Bu bağlamda, bir robotun davranışı kurallara dayalı belirleyici ve öngörülebilirdir.
Yaklaşımının gösterdiği söze rağmen; insan geri bildiriminin her zaman gerçekleşmediğini ve sistemin tatmin edici bir robot uyumu elde etmesini zorlaştırdığını buldu. Robot uyumu esasen, robotun; etkileşimde olduğu insanların beklentilerini yönetebilmesi ve onlarla etkili bir şekilde iletişim kurabilmesi anlamına gelir.
Kumar: “Robotla çalışan operatöre robot davranışını kontrol etme ve öngörülebilirlik hissi veren sistemin daha iyi bir şekilde uymasının, otomasyona olan güvenini ve dolayısıyla da görevin verimliliğinin artıracağına inandık. Ancak, daha sonra merak etmeye başladık, robotla çalışan bir insan operatörün ‘güvenini veya rahatlık seviyesini nasıl ölçersiniz?”
Kumar ve meslektaşları; zihinsel ve fiziksel stresin göstergesi olan insan fizyolojik sinyallerinin yanı sıra diğer duyguların da izlenmesinin insan-robot etkileşimini içeren bir görev sırasında doğru yönde atılacağına inanmaktadır. Bu inanç; bu tür sinyallerin (psikofizyolojik tepkiler olarak bilinir) robot davranışını ve hareketini değiştirmek için güvenilir göstergeler olduğunu tespit eden önceki araştırmalarla desteklenmiştir.

Araştırmacı Celal Savur; robotun hareket ve davranışının insan psikofizyolojik tepkileri üzerindeki etkilerini araştırmak için bir çalışma yaptı. Çalışmasının temel amacı; bir robotun hareketindeki hangi değişikliklerin korku veya stres gibi ‘insan rahatsızlığı’ tepkileriyle sonuçlandığını anlamaktı.
Savur: “Bunu yapmak için, robot hareketini ve insan fizyolojik durumunu aynı anda temsil eden ve kaydeden bir sistem için bir çerçeveye ihtiyaç vardı. Robot hareketi ve insan fizyolojik durumu arasındaki ilişki tanımlandıktan sonra, insan fizyolojik tepkisi; robotun hareketini / davranışını doğrudan kontrol etmek / güncellemek için bir geri bildirim olarak kullanılabilir. Bu sistemlere ‘fizyolojik hesaplama sistemleri’ denir. Fizyolojik bilgi işlem; daha etkileşimli bir oyun deneyimi elde etmek için oyunların gerçek zamanlı olarak, oyuncuların tepkilerine uyum sağladığı bilgisayar oyunlarında sıkça kullanılan, etkili bir bilgi işlem alanıdır.”
Savur ve Kumar, yaptıkları çalışmada; insan-robot işbirliğini içeren görevleri tamamlarken, insan psikofizyolojik tepkilerini izleyebilecek bir çerçeve geliştirmeye karar verdiler. Çalışmaları; bir kişinin zihinsel durumunun ve onun fizyolojik tepkilerinin birbirleriyle nasıl etkileşime girdiğini veya etkilediğini anlamaya çalışan bir sinirbilim dalı olan bilgisayar bilimi, robotik ve psikofizyoloji arasındaki kesişme noktasındadır.
Geliştirdikleri çerçeve, “fizyolojik hesaplama” kategorisine girer. Bu, kullanıcının psikofizyolojik aktivitesine gerçek zamanlı yazılım uyarlamasını içeren bir tür “etkili hesaplama” türüdür. Esas olarak, önerdikleri çerçeve; değişikliklerin nasıl değiştiğini araştırmak için kullanılabilir. Robotun hareketi (örn. hız ve yörüngesi) endüstriyel bir ortamda insan operatörünü etkiler.
*Robot üzerinde Hız ve Ayırma İzlemesi Uçuş Süresi lazer – değişen sensör dizileri/RIT/TechXplore
Kumar: “Örneğin, bir robotla çalışan iki operatörün; A ve B operatörü olduğunu düşünelim. Operatör A, robot davranışını (deneyiminden dolayı) tahmin edebileceği için daha uzun süre çalıştı ve robotla daha rahat çalıştı. Operatör B, yeni ve robotun hareketi konusunda biraz şüpheci… Robot davranışı, hız açısından değişiyor. Operatörün fizyolojik durumuna ve davranış modellerine bağlı olarak, operatörün yakınında olduğunda hareket eder ve ne kadar mesafe kaldığını gösterir. Bu senaryoda, daha iyi bir insan-robot etkileşimi için robot, operatör A’nın yakınında çalıştığından daha yüksek hızlarda hareket edebilir. B operatörü için ise daha yavaş çalışır. B operatörü daha fazla tecrübe kazandıkça, robot hareketi buna adapte olabilir, böylece güven oluşturulur ve toplam üretkenliği olumlu yönde etkiler.”
CMCRL’de araştırmacılar tarafından yürütülen bu çalışmanın iki ana amacı vardı: Birincisi, insan-robot etkileşimlerini kaydeden bir insan-robot işbirliği görevleri veritabanı oluşturmaktı. Daha sonra bu veritabanını, insan fizyolojik tepkilerinin bir robotun hareketini etkilemek için nasıl kullanılabileceğini araştırmak ve otomasyon sürecini olumlu yönde etkilemek istediler. Başka bir deyişle, amaçları endüstriyel ve üretim ortamlarında insan-robot işbirliği için fizyolojik bir bilgisayar sistemi oluşturmaktı.
Kumar: “Bizim çerçevemiz temelde robotun hareketini ve insan fizyolojik durumunu aynı anda temsil eden ve kaydeden bir sistemdir. Bu bilgiyi kaydetmek için, çerçeve robotlar, kameralar, hareket yakalama sistemi ve ayrıca biyolojik / biyometrik veri toplama cihazları gibi sensörlere arayüzler sağlar. Tüm bu cihazlar farklı örnekleme oranları üzerinde çalışırken; bu çerçeve senkronize olarak yardımcı olur.”
Geleneksel sosyal robotik deney düzeneklerinde; insan deneklere, bir deney sırasında veya sonrasında deneyimleri ve algıları hakkında sorular sorulur. Araştırmacılar, geri bildirimlerini kullanarak deney boyunca toplanan öznel verileri analiz edebilir ve ölçebilirler.
*İnsan robot işbirliği görevi sırasında, insan fizyolojik tepkisini izlemek için bir çerçeve/RIT/TechXplore
Kumar: “Denekleri kesen veya konuyu deneyimlerini hatırlatan yöntemler; her zaman deneyin bütünlüğünü koruyamaz veya öznel verileri doğru bir şekilde temsil edemez. Bu nedenle, geleneksel yöntemlerden farklı olarak, çerçevenin bu uygulaması; insan deneğin veya baş araştırmacının, insan robot işbirliği (HRC) deneyi / görevi gerçekleştirilirken olay belirteçleri oluşturmasını sağlar.”
Onların çerçevesi; dijital bir ikiz olarak bilinen sanal dünyadaki insan-robot temsiline dayanan olay işaretleyicilerini otomatik olarak oluşturabilir. Örneğin, robot ve insanın görev sırasında birbirine ne zaman en yakın olduklarını, robotun ne zaman durması gerektiğine veya bir insan hareketi tarafından ne zaman durdurulduğuna, insan tarafından gerçekleştirilen görevin ilerleyişine, komutlara dayalı olayların tanımlanmasına yardımcı olabilir.
Kumar: “Bizim çerçevemiz aynı zamanda araştırmacılara HRC deneylerini tekrarlamaları ve görselleştirmeleri için bir kullanıcı arayüzü sunmaktadır. Ayrıca, toplanan verileri analiz etmelerini ve etiketlemelerini sağlar. Çeşitli cihazlardan sürekli ve senkronize fizyolojik veri toplama ve bunları tek bir ekosistemde robot kontrolü ve ara yüzüyle birlikte arayüzleme, insan ve robot durumunun eksiksiz bir temsilini sağlar. Bu, insan fizyolojik durumu ile robotun hareketleri arasındaki neden ve sonucu anlamaya yardımcı olabilir. ”
Giyilebilir cihazların ve Nesnelerin İnterneti’nin (IoT) ortaya çıkmasıyla; insan fizyolojik verilerinin toplanması kolaylaşacak ve böylece hazır olacaktır. Araştırma tarafından geliştirilen çerçeve bu nedenle, insan-robot etkileşimlerini geliştirmek için bu verileri kullanmak üzere tasarlandığı için son derece değerli olabilir.
*HRC Sistem Sistemleri için Dijital İkiz Kurulum Geliştirme/RIT/TechXplore
Kumar: “Bu çerçeve, yerleşik olay oluşturma ve dağıtılmış sistemler üzerinde sinyal senkronizasyonu ile sürekli bir veri kaydını mümkün kılıyor ve denemenin bütünlüğünü koruyabiliyor (endüstriyel bir ortamda bir görev senaryosunu yeniden oluşturabilir) ve öznel verileri doğru bir şekilde temsil ediyor.”
Kumar ve meslektaşları; bu tür fizyolojik bilgi işlem yapabilen bir ajanın (yani, insan fizyolojik tepkilerini tespit edebilen ve bunlara cevap verebilen), insan kullanıcılarının ve robotların bir HRC’de olduğu kapalı bir döngü içinde insan sistemi ile sonuçlanabileceğine inanmaktadır. Bu, sonuçta halk arasında otomasyona olan güvenini arttırırken, aynı zamanda üretkenliği de artırabilecek daha iyi iletişim ile sonuçlanabilir. Gelecekte, araştırmacılar; çalışmalarında oluşturulan veritabanlarını diğer HRC araştırmacılarına sunmayı planlamaktadır.
Kumar: “Bir sonraki çalışmalarımız; kayıt sinyallerinin işlenmesi, bilgilerin çıkarılması ve robota geri bildirim sağlamak için makine-öğrenme algoritması uygulanması için fizyolojik hesaplama sisteminin eksiksiz bir kullanıcı arayüzü uygulamasını geliştirmeye odaklanacak. Bu çalışmanın nihai amacı, insan fizyolojik tepkilerinin adaptif robot hareket davranışına neden olmak ve nasıl sonuçlanabileceğini anlamak için kullanılabilecek bir veritabanı oluşturmaktır.”