Sürü robotiklerine odaklanan araştırma; robotik sistemleri soyut bir şekilde tanımlamak için tipik olarak teorik yaklaşımları kullanır. Robotik çalışmalarında sıklıkla kullanılan teorik bir model olan OBLOT; robotları tamamen aynı, hafızasız ve birbirleriyle iletişim kuramayan basit sistemler olarak temsil eden bir yaklaşımdır. İtalya L’Aquila Üniversitesi ve Perugia Üniversitesi’ndeki araştırmacılar; kısa süre önce OBLOT modelinin daha geniş bir yelpazedeki sürü robotik sistemlerine uygulanabilen bir uzantısı olan MOBLOT’u yarattı. 20. Uluslararası Otonom Ajanlar ve Çok Ajanlı Sistemler Konferansı’nda (AAMAS 2021) sunulan bu yeni model; atomların maddeyi oluşturmak için doğal olarak kendilerini düzenleme yollarından ilham alıyor.
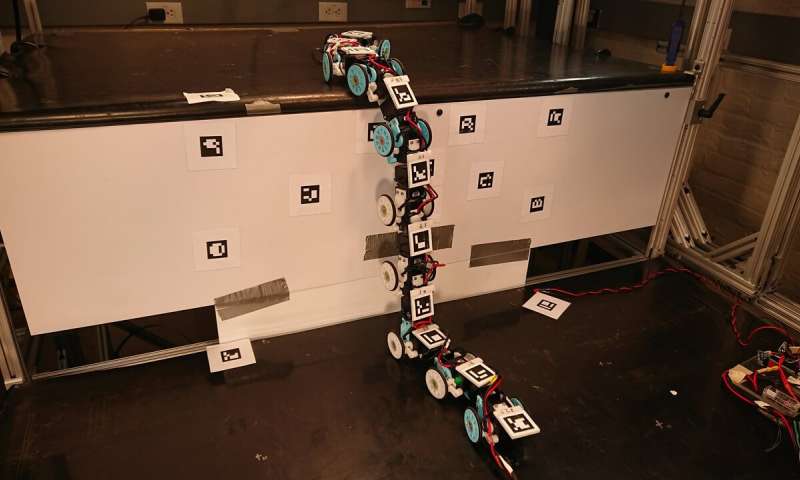
Araştırmacı Alfredo Navarra: “MOBLOT teorik sürü robotik bağlamında yeni bir model… MOBLOT (doğadan ilham aldığı için); Molecular OBLivious robOTs anlamına gelir: Moleküller oluşturmak için kendilerini birleştiren atomlar gibi, MOBLOT’ta da, basit (ve çok zayıf) robotlar; diğer robotlara göre bir ölçüde ve farklı yeteneklere sahip, daha karmaşık hesaplama birimleri (modelde moleküller olarak da adlandırılır) oluşturmak için hareket edebilir. “
Moleküler robotlar; oluşturulduktan sonra kendilerini belirli bileşim özelliklerine göre herhangi bir şekle sokarak robotik bir “madde” oluşturabilirler. Belirli bir şekli oluşturduktan sonra; diğer girdiler veya uyaranlarla birlikte sunulursa, moleküller bu şekli değiştirmek için konumlarını otomatik olarak yeniden düzenleyebilir; yani kendi kendini yeniden yapılandırabilir.
Araştırmacı Navarra: “Temel olarak, robot sürülerinin davranışını yönetmek için yeterince genel, doğadan ilham alan, daha güçlü varlıklar (moleküller) oluşturabilen bir model arıyorduk. Nihai hedefimiz, algoritmik olarak şekil değiştirebilen bir robotik maddeyi modellemek… Şimdiye kadar böyle bir teorik model düşünülmedi.”
MOBLOT, sürü robotiklerine odaklanan diğer çalışmalarda kullanılabilecek genel bir teorik modeldir. Bununla birlikte, başlangıçta “zayıf” robotlar düşünülerek tasarlandı. Bunlar; çok sınırlı yeteneklere sahip olanlar, yani hafızası olmayan veya birbirleriyle iletişim kuramayanlardı. Navarra ve meslektaşları, özellikle “zayıf” robotik sistemlere odaklandılar. Çünkü modellerinin ve onunla ilişkili algoritmaların mevcut, gelişmekte olan ve yeni geliştirilen çok çeşitli robotlara uygulanabileceğini umuyorlardı.
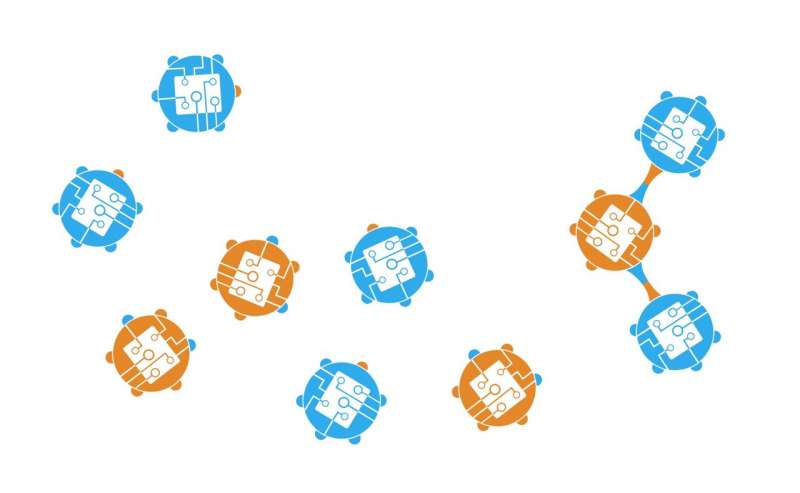
Araştırmacı Navarra: “Onu benzersiz kılan ana özellik, robotların kendilerini moleküller halinde (yapılandırılmış bir robot alt kümesi olarak) birleştirerek yeni yetenekler elde etmeleriyle ilgili olmasıdır. Bir molekül, aslında belirli bir kapsam ve hareket özelliklerine sahip, benzersiz bir varlık olarak kabul edilir. Bu, modele ‘biraz güç katmayı’ amaçlamaktadır, yani, hiçbir molekül oluşmadığında çözülemeyen bazı görevler vardır.”
MOBLOT modeli; OBLOT modeliyle ve diğer sürü robotik yaklaşımları ile karşılaştırıldığında, bir robot sürüsü oluşumunun simetrisinin bozulduğu daha geniş bir senaryo yelpazesine uygulanabilir. Esasen, model; daha karmaşık robotik yapılar (“moleküller”) oluşturmak için bir araya gelebilen çok basit robotların davranışını resmileştirir ve bunlar da farklı türlerde nihai bileşikler (“madde”) oluşturabilir. Bir dizi ön testte, araştırmacılar; robotları molekülleri oluşturan birimler olarak temsil ederek, MOBLOT’un sözde madde oluşumu problemini çözmeye yardımcı olabileceğini gösterdi. Gelecekte, model; potansiyel olarak diğer bilimsel ve robotik problemleri keşfetmek için de kullanılabilir. Ek olarak, bu yeni teorik model; tanımladığı robotik sistemlere benzeyen bileşimsel özelliklere sahip robotlar geliştirmeleri için diğer ekiplere ilham verebilir. Navarra ve meslektaşları, diğer mühendisler ve robotikçilerle işbirliği başlatarak, bu olasılığı daha fazla araştırmak istiyorlar. Bu arada, robotların gezinebileceği farklı ortamları da göz önünde bulundurarak modellerini genişletmeyi planlıyorlar.
Araştırmacı Navarra: “Şimdiye kadar MOBLOT, Öklid düzleminde hareket eden robotlarla ilgileniyor. Bu sürekli ortamda robotların, sonsuz küçük miktarlarda bile olsa, herhangi bir yönde ve herhangi bir miktarda doğru hareketler gerçekleştirebileceği varsayılır. Ancak, mekanik yetenekleri zayıf olan robotlar için, bu tür karmaşık hareketleri gerçekleştirmek mümkün olmayabilir. Bu nedenle, hareketlerin yalnızca ızgara çizgileri boyunca ve her adımda yalnızca komşu bir ızgara noktasıyla sınırlandırıldığı, ızgara tabanlı bir arazide robotların hareket etmesine izin vermenin sonuçlarını araştırıyoruz. “