Origami robotları; çalıştırma, algılama ve iletişimin birçok fonksiyonunu sıkıca entegre ederek oluşturulabilir. Ancak görev; plastikler ve bu tür robotik tasarımlar için kullanılan çalışmalar dahil olmak üzere geleneksel malzemeler, ilave işlevler için kısıtlamalar getirdiğinden zordur. Çok işlevlilikleri sisteme kurmak için bilim insanları tipik olarak robotun ağırlığını artıran harici elektronikler içermelidir. Son zamanlarda yapılan bir çalışmada, üretmek için Grafen Oksit (GO) özellikli bir sentez üretim süreci geliştirildi. Süreç; yeniden yapılandırılabilir, uyumlu ve çok işlevli metalik omurgalardır. Omurgalar, yerleşik gerginlik algılama ve kablosuz iletişim yetenekleriyle birleştirilmiş origami robotlarının temelini oluşturdu. Araştırmacılar GO yöntemini kullanarak kağıt şablonların yapısal kopyaları olarak karmaşık soy metal origamileri oluşturdular.
Araştırma ekibi; yeni origami robotlarını ve çok işlevli omurgalar oluşturmak için ince elastomerlerle stabil hale getirilmiş platin origami yapılarını çoğaltabilir. Yeni robotlar; diğer malzemeler kullanılarak üretilenlerden daha deforme olabilir, yangına dayanıklı ve güç açısından verimliydi. İsteğe bağlı rezistanslı ısıtma, gerilim algılama ve harici elektronikleri olmayan dahili antenler dahil olmak üzere yeni platin robotlar (Pt robotlar) için ilave yetenekler gözlendi. Ek yetenekler için; robot hareketlerinin gerçek zamanlı olarak izlenmesi veya kaydedilmesi, robotlar arasında kablosuz iletişim, ısı düzenlemesi ve manyetik kontrolün dahil edilmiş gerekir. Yeni çalışma; çok yönlü yumuşak robotları üretmek için robotik malzeme kütüphanesini zenginleştirdi.
Robot bilimindeki araştırmacılar; daha önce yapay Japon kasları, kendinden katlamalı makineler, yaylı origami sistemleri ve robotik metamorfozlar yapmak için eski Japon origami sanatını araştırmıştı. Geleneksel olarak; bu buluşlar ve omurgaları üretmek için; selüloz kağıdı, polyester, polieter eter keton ve politetrafloroetilen kullandılar. Sunulan mekanik desteğe rağmen; kağıt veya plastik omurgalar uyaranlara yanıt verme, algılama ve kablosuz iletişim işlevlerinden yoksundu. Araştırma ekipleri; bu tür işlevleri sağlamak için harici ekipman kurmak yerine, şimdi sıkı bir entegrasyon için çok fonksiyonlu yumuşak robot omurgaları geliştirmeyi hedefliyor. Araştırma çalışmaları; prototipik yumuşak robotları, iletken origami omurgalı, algılama ve iletişim potansiyeli ile henüz kanıtlayamamıştır. Sonuç olarak, bilim insanları mekanik olarak kararlı, yumuşak ve iletken robotik omurgalar üretmek için yeni bir imalat şeması geliştirmeye isteklidirler.
Üretim sürecinde ekip; çeşitli metal iyon öncüllerini birleştirmek için Grafen Oksit (GO) çok katmanlıları, ardından yüksek boyutlu GO yapılarını üretmek için yüksek sıcaklıkta tavlama ve kalsine etme* işlemlerini kullandı. Metal oksit kopyaları arasında mikro kimyasallar, serbest duran teller ve mükemmel kimyasal kontrol ve yapısal çoğaltma ile karmaşık origami yapıları yer almaktadır. Önerilen GO türevli yöntem; yumuşak robotlar için çok işlevli omurgalar gibi karmaşık metalik mimariler üretmek için yeni bir platform sağlayacak.
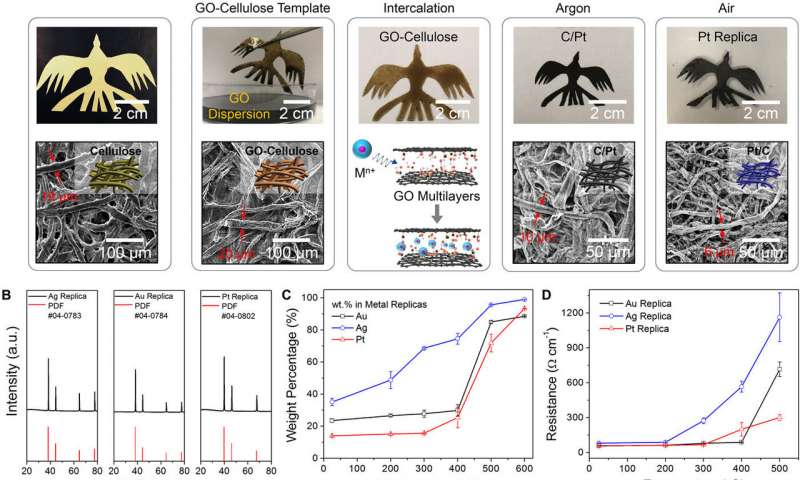
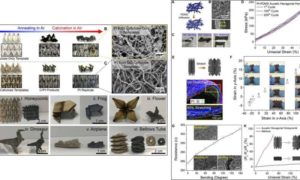
Ekip; GO-etkin şablonlama işlemini kullanarak selüloz kağıt filmlerini veya origami şekillerini çeşitli metal kopyalara dönüştürdü. Soy metal tuzu (Mn +) – birbirine geçmeli GO-selüloz kompleksleri (M-GO-selüloz) oluşturmak için anka kuşu şeklinde bir şablonla başlayan üretim sürecinde dört ana adımı izlediler. Elde edilen metal kopyalara üretim sırasında daha fazla kalsinasyon işlemleri uygulandı ve araştırma ekibi kalsinasyon sıcaklıklarını ayarlayarak onları kontrol etti. Bilim insanları, çeşitli 3D origami yapılarını selüloz kâğıt formundan platin metale dönüştürerek altıgen petekler, kurbağalar, çiçekler, dinozorlar, uçaklar ve körükler gibi karmaşık metalik origami yapıları oluşturdular.

Mekanik stabiliteyi arttırmak için, büyük deforme olma ve geri dönüşümlü yeniden yapılandırma için metal origami yapılarına ince elastomerler eklenmiştir. Ekip; altın (Au) veya gümüş (Ag) ile karşılaştırıldığında etkin yapısal koruma, yüksek mekanik esneklik ve yüksek elektrik iletkenliği nedeniyle platin metali seçti.
Ekip, yüksek elektrik iletkenliği ve mekanik esneklik için Pt-elastomer omurgasını optimize etti, elde edilen düzlemsel Pt-elastomer kompoziti için büyük ve tekrarlanan deformasyonu sürdürdü.
Yeniden yapılandırılabilir metalik omurgalar; yangına dayanıklılık için içsel potansiyel de dahil olmak üzere meta malzeme origami robotları oluşturmak için çok sayıda ve farklı işlevsellikler ortaya koydu. Araştırma ekibi; Pt robotlarının uzun süre maruz kalmaları için (30 saniye boyunca 8000C) alevle doğrudan temasta bulunmalarını sağlayarak, saniyeler içinde ateşlenen bir kağıt robotu (5 saniyeden az) sunarak bu özelliği test etti.
Pt-elastomer omurgası; selüloz kâğıtlı robotlardan daha ince ve daha hafifti ancak geri dönüşümlü robotik çalıştırma sırasında mekanik olarak sabit kalmıştır. Kağıt tabanlı robot; uzatmak veya daraltmak için büyük basınç değişiklikleri gerektiriyordu. Pt robot ise sadece daha düşük basınç değişiklikleri gerektiriyordu. Ekip, daha sonra elektromanyetik (EM) dalgalar göndermek ve almak için iletken Pt origami robotu geliştirdi ve kablosuz iletişim için yeniden yapılandırılabilir bir anten görevi gördü. Üretimden önce, araştırma ekibi Pt robotlarının yayılan antenler olarak kullanımını keşfetmek için 3D radyasyon modellerini simüle etti ve daha sonra üretti. Bilim insanları ayrıca; gönderici ve alıcı olarak görev yapan iki Pt robotu arasında kablosuz iletişim kurdular. Bir gönderici robot farklı frekanslarda darbe sinyalleri gönderdiğinde, 1.2 m uzağa yerleştirilen alıcı robot, gönderilen ve alınan sinyaller arasında frekans sapması olmadan bunları aldı.

Ekip, (1) omurga yoğunluğu, (2) mekanik sertlik, (3) enerji verimliliği, (4) zorlanma algılama yeteneklerine göre GO özellikli Pt metalik omurgalarını kullanmanın teknik avantajlarını göstermek için çalışmadaki beş robotik özellik kategorisini ve (5) kablosuz iletişim yeteneklerini karşılaştırdı.
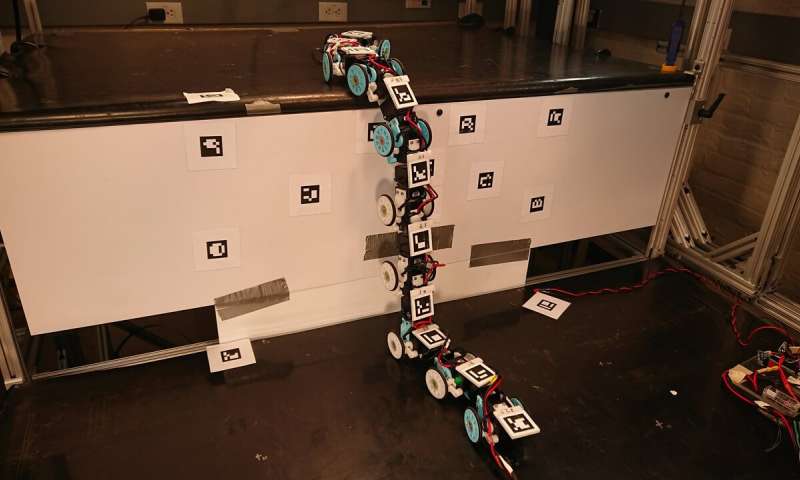
Araştırma ekibi ayrıca, kablosuz iletişim için iki Pt robotunu optimize etti; gönderen bir robot, yönlendirilmiş bir yolu izleyerek bir mühendislik engelini başarıyla atlamak için bir alıcı robota kablosuz olarak yönlendirme talimatlarını iletti.
Ekip daha sonra ilave 3D üretimi kullanan sistemin uygulamalarını genişletti; burada Pt-Go-selüloz mürekkebini Kaynaşık Biriktirme Modellemesi (FDM) ile 3D baskı metalik robot omurgası kalıplanmış şekillerine birleştirdiler. Daha sonra, manyetik alanlarla uzaktan kumanda için Pt robotları tasarladılar. Bunun için ekip; Pt-Go-selüloz mürekkepli bir Pt kopyasını sentezledi ve manyetik bir Pt omurgası oluşturmak için polimer çözeltisine manyetik parçacıklarla sızdı. Yeni yapılar, normal yerleşik gerilim algılama ve ilave manyetik hareket ile kablosuz iletişim yeteneklerini içeriyordu. Manyetik Pt robotları, dönen manyetik alanlarla aynı hizada ilerlemek için manyetik aktüasyon altında geri dönüşümlü bir şekle ve vücut dönüşümüne maruz kalabilir.

Bu şekilde, ekip; metalik origami robotları inşa etmek üzere yeniden yapılandırılabilir, uyumlu ve çok işlevli metalik omurgalar üretmek için Go özellikli bir şablonlama sentezi protokolü geliştirdi. Robotlar; yerleşik gerilim algılama ve kablosuz iletişim yetenekleri içeriyordu. Gümüş, altın ve platin gibi kompleks soy metallerden yapılan sentetik metalik omurgalar; diğer kağıtların yüksek yapısal kopyalarıydı. Geleneksel kağıtlar ve plastiklerle karşılaştırıldığında, yeniden yapılandırılabilir Pt-elastomer omurgaları; hafif, deforme olabilirliği ve güç verimliliği sunmuşlardır.
Ekip; yüksek riskli ortamlardaki faaliyetlerden, yapay kaslarda ve robot kollarda kullanım için ve uzaktan kumandalı bağlanmamış robotlar olarak kullanılan metalik origami robotları için pratik uygulamalar öngörür. Daha sonra enerji depolama cihazları oluşturmak için metalik omurgaları elektrokimyasal olarak aktif malzemelerle optimize etmeyi amaçlar. Bu gelişmeler, robotik malzeme kütüphanesini, çok işlevli entegrasyon ile çeşitli yumuşak robotlar üretecek şekilde zenginleştirecektir.
*Kalsine etmek: 1. Yakarak toz haline getirmek veya gelmek, kirecimsi bir hale gelmek.
2. Sıvı radyoaktif artıkların, zararsız halde saklanması amacıyla 800 °C gibi yüksek sıcaklıkta granül toz haline getirilmesi.