Ecole Centrale de Lyon’daki araştırmacılar, kısa bir süre önce, insanların uzun süreli bellek ve mantıklı düşünme mekanizmalarından esinlenen yeni bir yapı geliştirdiler. Bu yapı, Tokyo’daki IEEE ICDL-Epirob’da sunulan ve arXiv üzerinde önceden yayınlanan bir makalede özetlenen robotların, kara kutu olarak kabul edilen herhangi bir eylem veya görme modülünden ayarlanan hiper parametrelerin otonom olarak optimize edilmesine izin veriyor.
Son yıllarda, araştırmacılar çeşitli görevleri tamamlayabilecek robotlar ürettiler. Bununla birlikte, bu robotların çalıştığı ortam genellikle kısıtlıdır. Bunun nedeni robot teknolojisinin, çoğu algoritmanın, robotun belirli bir durumda karşılaşabileceği olası zorlukları tahmin etmesi için insan uzmanlar tarafından elle oluşturulması ve optimize edilmesidir.
Araştırmayı yürüten Maxime Petit, “Belirsizliklerle başa çıkarken, örneğin, robotun ömrü boyunca sık sık yeni nesnelerle uğraşması gerektiğinde, her zaman insan mühendislerinden ek programlara ve optimizasyona güvenmek uygun değildir. Yani robot kendi başına öğrenmelidir. Robotların, özerk olmaları ve beklenmedik hallerde bile çeşitli durumlara uyum sağlamaları için öğrenme mekanizmalarına sahip olmak istiyoruz.”
Farklı durumlara otomatik olarak uyum sağlayan robotlar, robotik silahların homojen yığınlardan bilinmeyen nesneleri alması gerektiği endüstriyel robotlar bağlamında bir dizi faydalı uygulamaya sahip olabilir.
Petit, “Robotun, her nesne için birkaç saatten kısa bir süre boyunca vizyon tabanlı bir yakalama yazılımının parametrelerini otonom olarak optimize etmesini istedik. Bunu yaparken, çocukların dünya hakkında nasıl öğrendiklerini çoğaltmayı amaçlayan bir gelişimsel yapı kullandık. Özellikle, bir görevin diğerine benzer şekilde aktarılmasıyla, öğrenme sürecini hızlandırmak için nesneler arasındaki benzerlikten yararlanmak istiyoruz.”
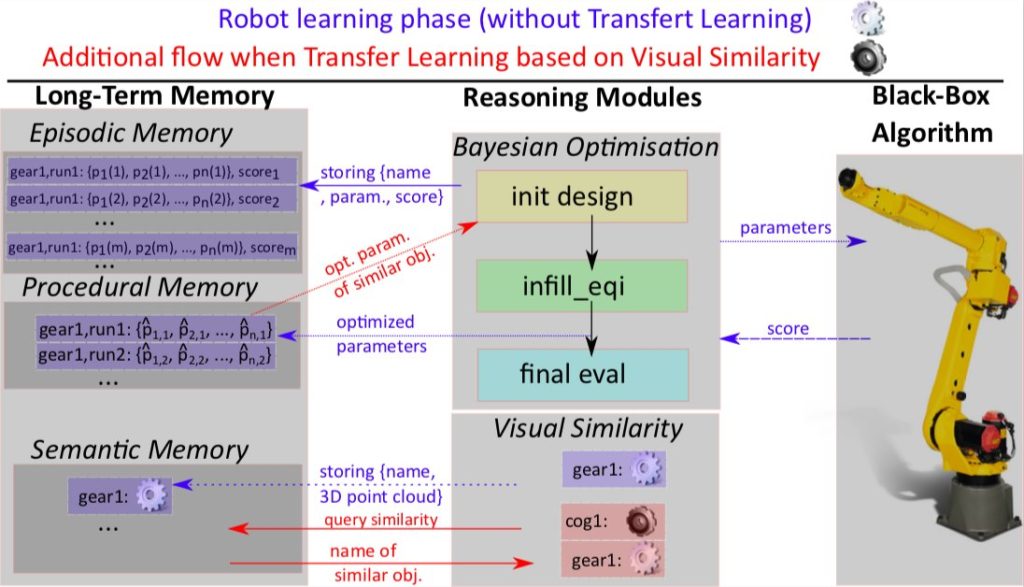
Petit ve meslektaşları tarafından sunulan yapı, çocuklarında gözlemlenebilen benzer bir süreçle robotlarda yeni becerilerin yaşam boyu ve açık uçlu öğrenimini sağlamayı amaçlamaktadır. Bunu başarmak için, geliştirdikleri yapıda robotların deneyimlerini sakladıkları uzun süreli bir hafıza ve bunların saklanan verilerindeki yararlı öğeleri tanımlamasına olanak veren mantıklı düşünme yetenekleri de vardır.
Petit “Bayesci optimizasyon yöntemi akıllı ‘dene ve yanıl’ stratejisi olarak çalışır: Robot, önceki değerlendirmenin sonuçlarına göre değerlendirme yaparak en iyi parametreler kümesini tahmin eder. Kısacası, bu yöntem, robotu denenmemiş değerler etrafında parametreler keşfetme konusunda verimli bir şekilde yönlendirir ve aynı zamanda yüksek potansiyele sahip olan değerlere doğru yöneltir.”
Robot Öğrenmeye Sıfırdan Başlar
Geleneksel Bayesyen optimizasyon yöntemleri genellikle kullanılmak istenmediğinden, robotun öğrenmesi karşılaştığı her yeni nesne için sıfırdan başlar. Bu sınırlamaya hitap etmek için araştırmacılar vizyon benzerliğine dayanan bir strateji kullandılar.

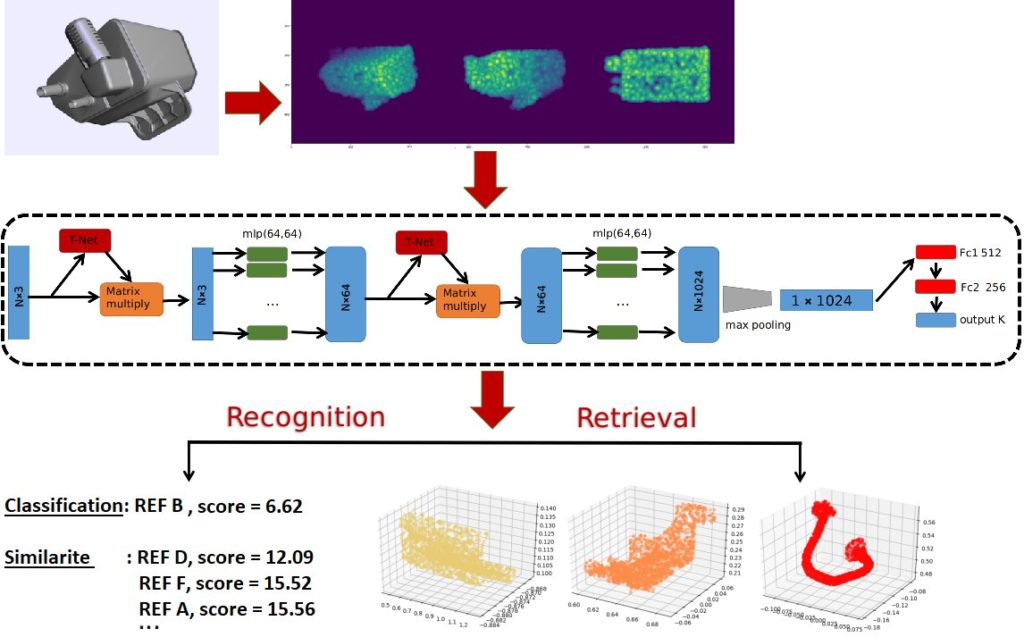
Petit, “Robotun önceki deneyimlerinden farklı ama benzer görevler için yararlanmak istedik. Böylece robotu, yeni bir nesne ile karşı karşıya kaldığında başlangıçta benzer nesneler için optimize edilmiş çözümleri araştırmaya zorluyoruz. Örneğin, robot, bir portakalı nasıl kavradığını biliyorsa ve şimdi de bir elmanın nasıl kavranacağını öğreniyorsa, robotu “turuncuyu kavra” stratejisini kullanarak elmayı kavramaya zorluyoruz. Görsel benzerlik modülüne yeni nesnelere benzer nesnelerin neler olduğunu sorarak yapıyoruz ve bu çalışma benzer nesneleri uzun süreli bellekten çıkarmak için en iyi yöntemdir.”
Araştırmacılar geliştirdikleri yapıyı bir simülasyon ortamında değerlendirdiler. Görsel benzerliğe dayalı transfer öğrenme stratejisinin, amnezik öğrenmeden çok daha faydalı olduğunu fark ettiler.
Endüstriyel Robotik Kurulumu
Şimdiye kadar, geliştirdikleri yapı öncelikle robotik bağlam kapsamında araştırıldı. Örneğin, sosyal robotlar kullanıcılarının ihtiyaçları veya tercihlerine göre kişiselleştirmeye yardımcı oluyor.
Petit, “Bu yapıyı endüstriyel robotik kurulumunda kullanmak, ikna edici sonuçlara yol açarak, sosyal ve endüstriyel robotik alanların birbirlerinden öğrenecekleri çok şey olduğunu ima ediyor. Çalışmamızın bir başka ilginç yönü de, yapının ” kara kutu “algoritmasını optimize etmesi. Bu durum, farklı uygulamalara ve algoritmalara da uygulanabileceği anlamına gelir.”
Araştırmacılar, robotların simülasyonlar sırasında elde edilen nesneler hakkındaki bilgileri aynı objeleri içeren gerçek görevlere aktarma yollarını araştırıyorlar. Bu, bir robotun verimliliğini daha da iyileştirir ve yeni şeyler öğrenmesini sağlar. Böylece bunları gerçek hayatta uygular.
Petit, “Fiziksel özellikleri paylaşan nesneler için parametrelerin optimizasyonu, belirli robotlar için böyle bir kavramın ortaya çıkmasına da yol açabilir. Örneğin, bir robot” düz “,” ağır “,” uzun “vb nesnelerin, bir parametre alt kümesi için özel değerler ile kavranması gerektiğini öğrenebilir. Böylece bu, insan-robot etkileşimlerini ve öğrenimini geliştirmek için kullanılabilir.”